
Голень относительно тазобедренного сустава имеет степеней свободы
Как известно, тело, ничем не ограниченное в движениях, называется свободным, так как может двигаться в любом направлении. Отсюда, каждое свободное твердое тело имеет шесть степеней свободы движения. Оно обладает возможностью производить следующие перемещения: три перемещения поступательного характера, соответственно трем основным системам координат, и три вращательных движения вокруг этих трех координатных осей.
Наложение связей (закрепление) уменьшает количество степеней свободы. Так, если тело в одной своей точке закреплено, оно не может производить перемещение вдоль координатных осей, его движения ограничиваются лишь вращением вокруг этих осей, т.е. тело имеет три степени свободы. В том случае, когда закрепленными являются две точки, тело обладает только одной степенью свободы, оно может лишь вращаться вокруг линии (оси), проходящей через обе эти точки. И наконец, при трех закрепленных точках, не лежащих на одной линии, количество степеней свободы равно нулю, и никаких движений тела быть не может. У человека пассивный аппарат движения составляют части его тела, называемые звеньями. Все они соединены между собой, поэтому теряют возможность к трем видам движений вдоль координатных осей. У них остаются только возможности вращения вокруг этих осей. Таким образом, максимальное количество степеней свободы, которым может обладать одно звено тела по отношению к другому звену, смежному с ним, равняется трем.
Это относится к наиболее подвижным суставам человеческого тела, имеющим шаровидную форму.
Последовательно или разветвленные соединения частей тела (звеньев) образуют кинематические цепи.
У человека различают:
- — открытые кинематические цепи, имеющие свободный подвижный конец, закрепленный лишь на одном своем конце (например, рука по отношению к туловищу);
- — замкнутые кинематические цепи, закрепленные на обоих концах (например, позвонок — ребро — грудина — ребро — позвонок).
В открытых кинематических цепях человеческого тела подвижность исчисляется десятками степеней свободы. Например, подвижность запястья относительно лопатки и подвижность предплюсны относительно таза насчитывает по семь степеней свободы, а кончики пальцев кисти относительно грудной клетки — 16 степеней свободы. Если суммировать все степени свободы конечностей и головы относительно туловища, то это выразится числом 105, слагающимся из следующих позиций:
- — голова — 3 степени свободы;
- — руки — 14 степеней свободы;
- — ноги — 12 степеней свободы;
- — кисти и стопы — 76 степеней свободы.
Для сравнения укажем, что преобладающее большинство машин обладает всего одной степенью свободы движений.
В шаровидных суставах возможны вращения около трех взаимно перпендикулярных осей. Общее же количество осей, около которых возможны в этих суставах вращения, до бесконечности велико. Следовательно, относительно шаровидных суставов можно сказать, что сочленяющиеся в них звенья из возможных шести степеней свободы движений имеют три степени свободы и три степени связанности.
Меньшей подвижностью обладают суставы с двумя степенями свободы движений и четырьмя степенями связанности. К ним относятся суставы яйцевидной или эллипсовидной и седловиной форм, т.е. двухосные. В них возможны движения вокруг этих двух осей.
Одну степень свободы подвижности и вместе с этим пять степеней связанности имеют звенья тела в тех суставах, которые обладают одной осью вращения, т.е. имеют две закрепленные точки.
В преобладающей части суставов тела человека две или три степени свободы. При нескольких степенях свободы движений (двух или более) возможно бесчисленное множество траекторий. Соединения костей черепа имеют шесть степеней связанности и являются неподвижными. Соединение костей при помощи хрящей и связок (синхондрозы и синдесмозы) могут иметь в некоторых случаях значительную подвижность, которая зависит от эластичности и от размеров хрящевых или соединительнотканных образований, находящихся между данными костями.
Рассмотренная система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
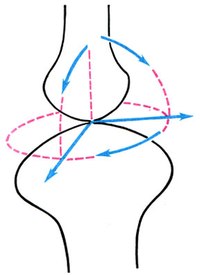
В открытой системе кинематической цепи объем движений концевого отдела части тела определяется путем сложения суммы степеней свободы всех промежуточных звеньев, составляющих эту часть тела. Не ограниченное в свободе перемещающееся тело обладает шестью степенями свободы в виде поступательного движения в трех измерениях (вверх вниз, вперед назад, вправо влево) и вращательных движений в тех же измерениях. При скреплении одного звена тела в отношении другого ограничиваются степени свободы. При анализе возможных движений двух твердых тел (например, в шаровидном суставе), соприкасающихся в одной точке, видно, что тела способны переместиться взаимно в пяти направлениях и сохранить пять степеней свободы (рис. 1). Эти пять степеней свободы возможны в суставе только теоретически, а фактически подвижность в суставах имеет только три степени свободы. Это ограничение создают капсулы, связки и мышцы, окружающие сустав. Тремя степенями свободы обладают шаровидные суставы, двумя - эллипсоидные, седловидные и мыщелковидные (коленный сустав), одной - цилиндрические и блоковидные. Свободная верхняя конечность представляет открытую кинематическую цепь. Плечевой сустав обладает тремя степенями свободы, локтевой сустав - одной, суставы между костями предплечья - одной, лучезапястный сустав - двумя степенями свободы. Таким образом, кисть способна относительно туловища совершать перемещение по 7 степеням свободы в пределах радиуса всей верхней конечности, имея полную свободу движений.
Рис. 1. Пять степеней свободы тела, соприкасающегося одной точкой с другим телом
Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают "запирающие" сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым ". устраняются все свободы перемещения, за исключением одной"*. Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
* (Ухтомский А. А. Физиология двигательного аппарата. Сб. соч. Т. III Л., 1945, с. 145.)
ПАРА СИЛ
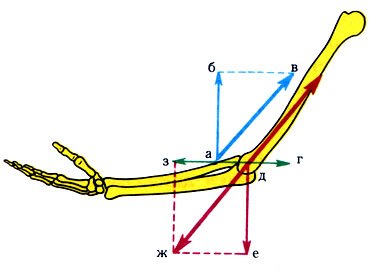
Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 2), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ - момент силы и АГ - силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.
Рис. 2 . Схема действия 'пары сил' (по М. Ф. Иваницкому). ав - равнодействующая двуглавой мышцы плеча; дж - противодействие со стороны плечевой кости; аб - 'полезная' составляющая двуглавой мышцы плеча; аг - другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де - составляющие силы давления плечевой кости на предплечье; ад - плечо пары сил, из которых одна сила аб, а другая - де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе
Содержание
- 1 Кинематическая цепь
- 1.1 Открытая или незамкнутая кинематическая цепь
- 1.2 Закрытая или замкнутая кинематическая цепь
- 1.3 Рычаги
- 1.4 Амплитуда движений
- 2 Читайте также
Кинематическая цепь [ править | править код ]
Кинематическая цепь (к.ц.) - последовательное соединение ряда относительно подвижных кинематических пар (рука, нога или все тело спортсмена). В зависимости от наложенных на тело связей, различают три основных вида кинематической цепи, важных для понимания техники спортивного движения.
- свободная кинематическая цепь (при безопорных движениях)
- открытая или незамкнутая кинематическая цепь (с фиксацией одного ее конца в положениях типа стоек на руках, ногах, висов, а также при движениях свободной конечности - мах рукой, ногой и т. п.)
- закрытая или замкнутая кинематическая цепь (положения при фиксированных обоих концах кинематической цепи, например - с одновременной опорой руками и ногами).
С точки зрения управления движением наиболее важен случай открытой кинематической цепи, при которой сохраняются возможности опорного энергетического взаимодействия с одновременными активными действиями высокомобильными периферическими звеньями. Степени свободы звеньев открытой кинематической цепи зависят от положения звена относительно опоры. Потенциально наиболее подвижны и энергонасыщенны периферические звенья кинематической цепи, например, рука метателя при броске. Вместе с тем чем больше степеней свободы у звена, тем выше риск двигательной ошибки. Одна из сторон кинематики опорно-двигательный аппарат связана с подвижностью в суставах, которая зависит от ряда факторов. Один из них носит принципиально морфологический характер: шаровидные суставы (плечевой, тазобедренный) допускают трехосное вращение звена, а блоковидные (локтевой) имеют лишь одну степень свободы.
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях (если не учитывать взаимодействия мышц) . Например, свободные конечности, когда их концевые звенья свободны, представляют незамкнутые цепи. Замкнутыми кинематическими цепями в теле человека являются, например, грудина, ребро, позвоночник, ребро и снова грудина.
Такие замкнутые цепи разомкнуть невозможно. Незамкнутые могут замыкаться, причем часто через опору. В сложной пирамиде, составленной несколькими акробатами, образуются даже своего рода "сети" (в плоскости) и "решетки" ( в пространстве) с очень сложной взаимной зависимостью движений звеньев.
В замкнутой или замкнувшейся цепи невозможно изолированное движение, т.е. движение в одиночном сочленении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других.
Таким образом, движения в незамкнутых цепях характеризуются относительной независимостью звеньев. В замкнутых же, а также замкнувшихся цепях движения одних звеньев влияют на движения даже отдаленных звеньев (помогают или мешают).
В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
В открытой кинематической цепи подвижность каждого следующего звена равна его собственной подвижности плюс подвижность предыдущих звеньев. Так, если у бедра три степени свободы, а у голени относительно бедра еще две степени, то голень относительно таза имеет пять степеней свободы. Наибольшие возможности движений - у конечных звеньев цепи. Но больше шести степеней свободы конечное звено цепи иметь не может. Если же при суммировании степеней свободы получается, что конечное звено имеет их больше шести, то это только значит, что при фиксировании этого звена промежуточные звенья сохраняют степени свободы на шесть степеней меньше. Так, кисть имеет относительно лопатки семь степеней свободы (плечевой сустав - 3, плюс локтевой - 2, плюс лучезапястный - 2) . Если положить кисть на стол, то плечо и предплечье сохраняют 7-6=1 степень свободы. Они смогут двигаться лишь по одной траектории, вокруг оси, соединяющей плечевой и лучезапястный суставы.
Кости, соединенные подвижно, образуют основу биокинематических цепей. Приложенные к ним силы (мышечные тяги и др.) действуют на звенья биокинематической цепи, как на рычаги. Это позволяет передавать действие силы по цепям, а также изменять эффект приложения сил. Таким образом, рычаг как простейший механизм служит для передачи движения и силы на расстояние.
Различают рычаги первого рода (двуплечий) и второго рода (одноплечий) . Первый характеризуется тем, что две группы сил приложены по обе стороны от оси (точки опоры) рычага, а во втором случае - по одну сторону.
Вне зависимости от вида рычага в каждом из них выделяют:
- точку опоры;
- точку приложения сил;
- плечи рычага (расстояние от точки опоры до места приложения сил) ;
- плечи сил (длина перпендикуляра, опущенного из точки опоры на линию действия силы) .
Мерой действия силы на рычаг служит ее момент относительно точки опоры. Поэтому для равновесия либо равномерного вращательного движения звена как рычага необходимо, чтобы противоположно направленные моменты сил относительно оси рычага были равны. Для ускорения (торможения) звена один момент силы должен быть больше другого. Так, момент движущих сил, преобладая над моментом тормозящих сил, придает звену положительное ускорение (в сторону движения) . Если же большим оказывается момент тормозящих сил, то он вызывает торможение звена.
С помощью рычага можно выиграть в силе. Для этого нужно действовать мышечной силой на более длинное плечо. Согласно "золотому правилу механики", выигрывая в силе, одновременно проигрываем в пути и в скорости. Наоборот, если действовать мышечной силой на короткое плечо, то можно выиграть в пути и в скорости за счет проигрыша в силе.
В большинстве случаев мышцы прикрепляются недалеко от сустава и подходят к кости под острым углом. Поэтому плечо силы тяги мышцы, как правило, небольшое. Обычно плечо силы тяги мышц меньше плеча силы сопротивления, и, следовательно, при работе мышцы получается проигрыш в силе и выигрыш в пути и в скорости движения. Для некоторого увеличения плеча силы тяги мышц большое значение имеют костные выступы, бугры, сесамовидные косточки, к которым мышцы прикрепляются или через которые они переходят . Выступы, бугры, сесамовидные косточки увеличивают угол подхода мышцы к кости как к рычагу, тем самым увеличивают плечо силы тяги мышцы и момент вращения мышечной силы. Таким образом, можно выделить две причины проигрыша в силе. Первая - прикрепление мышцы вблизи сустава, вторая - тяга мышцы вдоль кости под очень острым (или тупым) углом.
Можно указать еще и на третью причину некоторых потерь в силе мышц. При больших нагрузках напрягаются все мышцы, окружающие сустав. Мышцы-антагонисты, создавая моменты сил, которые направлены противоположно, полезной работы не производят, а энергию затрачивают. Но в конечном счете в этом есть определенный смысл: хотя и возникают потери энергии, сустав во время больших нагрузок получает укрепление напряжением мышц, которые его окружают.
В связи с особенностями приложения мышечных тяг к костным рычагам необходимы весьма значительные напряжения мышц для выполнения не только силовых, но и скоростных движении. При этом следует помнить, что входящие в биокинематические цепи звенья тела образуют системы составных рычагов, в которых "золотое правило" механики проявляется намного сложнее, чем в простых одиночных рычагах.
Амплитуда движений в суставах зависит как от морфологии сустава (с пределами, определенными костной конструкцией сустава), так и от податливости мягких тканей, окружающих сустав (суставная сумка, прилегающий мышечно-связочный аппарат). Последняя может изменяться в процессе тренировки и является предметом специальных занятий на гибкость и подвижность в суставах. Одним из аспектов кинематики опорно-двигательный аппарат спортсмена является также аксиальная взаимосвязь движений в суставах пояса верхних конечностей. Так, одновременное сочетание движений на разгибание плеча с супинацией руки (или сгибания плеча с одновременной пронацией) позволяет осуществлять вращательные движения в поясе верхних конечностей без ограничений по углу поворота, что обеспечивает щадящий режим работы сустава. Противоположное сочетание движений (разгибание с пронацией, сгибание с супинацией) вызывает форсированную, предельную деформацию мягких тканей плеча, чреватую травмой. Вместе с тем именно такой режим работы может быть использован для развития подвижности в суставах.
Статья на тему: "Степени свободы в суставах таблица" с комментариями профессионалов. На этой странице мы постарались в полной мере раскрыть тему и ждем ваши отзывы.

- 1 Пояс нижних конечностей
- 2 Возможные движения в суставах
Форма суставов стоит в тесной связи с их функцией. В учении о суставах находит свое наглядное выражение диалектическое положение о единстве и взаимообусловленности строения и функции. Изучение движений в суставах — артрокинематика — является одним из разделов биомеханики.
В суставах осуществляется движение костей относительно друг друга. Каждая отдельно взятая кость, если рассматривать ее как физическое тело, может совершать поступательные движения по трем направлениям и вращаться вокруг трех взаимно перпендикулярных осей. Соответственно этому она имеет 6 степеней свободы. В скелете кость утрачивает часть степеней свободы, поскольку суставы позволяют осуществлять лишь вращательные движения вокруг одной, двух или трех осей. Количеством осей вращения и определяется число степеней свободы отдельных звеньев скелета.
В анатомии выделяют сагиттальную, фронтальную и вертикальную оси. Движения, осуществляемые вокруг названных осей, определяют как сгибание (flexio) и разгибание (extensio) вокруг фронтальной оси, отведение (abductio) и приведение (adductio) вокруг сагиттальной оси, и собственно вращение (rotatio) вокруг вертикальной оси. В качестве особого вида рассматривают круговое движение (circumductio), при котором периферический конец кости движется по окружности.
При любом движении, кроме вращения вокруг собственной оси, каждая точка кости описывает в пространстве некоторую кривую линию. Если взять точку, находящуюся на механической оси кости, то все ее движения совершаются в определенной плоскости, которая всегда выпукла со стороны, противоположной суставу. Эта плоскость представляет собой сферу, или овоид, движения. Протяженность овоида движения зависит от амплитуды движений в суставе. Это понятие помогает описывать и графически представлять движения в суставах.
Число степеней свободы и типы движений в суставах зависят от формы суставных поверхностей. К одноосным суставам с одной степенью свободы относят блоковидные и цилиндрические суставы. Двухосными с двумя степенями свободы являются эллипсоидные, седловидные и мыщелковые суставы. К многоосным суставам с тремя степенями свободы принадлежат шаровидные, чашеобразные и плоские суставы.
В некоторых руководствах, преимущественно старых, выделяется еще один вид суставов – тугие суставы, или амфиартрозы. Под этим названием выделяется группа сочленений с различной формой суставных поверхностей, но сходных по другим признакам: они имеют короткую, туго натянутую суставную капсулу и очень крепкий, нерастягивающийся вспомогательный аппарат. Тугие суставы смягчают толчки и сотрясения между костями. В амфиартрозах движения имеют скользящий характер и крайне незначительный объем.
Важное значение в артрокинематике имеет понятие о конгруэнтности суставов. Суставные поверхности имеют почти всегда различную площадь и кривизну. Поверхности, которые полностью соответствуют друг другу, называются конгруэнтными. Если такое соответствие отсутствует, говорят о неконгруэнтных поверхностях. Если сравнить тазобедренный и плечевой суставы, то можно видеть, что в тазобедренном суставе сочленяющиеся поверхности более подходят одна к другой, чем в плечевом суставе. Поэтому тазобедренный сустав является в большей степени конгруэнтным. Конгруэнтность поверхностей в каждом суставе не является постоянной, она изменяется при движениях и в зависимости от нагрузки. При нагружении сустава площадь контакта суставных поверхностей возрастает, и конгруэнтность увеличивается. Это способствует более равномерной передаче нагрузки на суставные концы костей.
Исходя из анализа конгруэнтности суставных поверхностей, Мак-Конейл различает в каждом суставе замкнутое и разомкнутое положения. Замкнутым является такое положение, при котором достигается максимальная конгруэнтность сустава. При замкнутом положении связки, укрепляющие сустав, натянуты и напряжены, они прижимают суставные поверхности друг к другу и полностью проявляют свою стабилизирующую функцию. Сустав в замкнутом положении максимально устойчив, количество степеней свободы в нем падает до нуля. При всех других положениях сустав является разомкнутым. При этом суставные поверхности становятся неконгруэнтными, связки расслабляются и могут быть реализованы все степени свободы для данного сустава.
Рассмотрим эти положения применительно к конкретным суставам. В плечевом суставе замкнутое положение достигается при отведении и вращении наружу плечевой кости. При этом плечевая кость стабилизируется и может перемещаться только вместе с лопаткой. Замыкание локтевого сустава происходит при разгибании и супинации. В лучезапястном суставе замкнутое положение соответствует полному разгибанию кисти; подвижность в суставе при этом отсутствует. У коленного и голеностопного суставов замкнутым также является положение полного разгибания. Чтобы восстановить подвижность в суставе, его нужно привести в разомкнутое положение. Во всех приведенных случаях это достигается сгибанием в сочетании с небольшим вращением внутрь. При замыкании суставов создаются условия, способствующие переломам костей при травмах, ввиду того, что не может проявиться рессорное действие соединений. Так, перелом лучевой кости чаще всего происходит при падении на вытянутую руку с разогнутой кистью, когда лучезапястный и локтевой суставы находятся в замкнутом положении.
Описываемые в учебниках виды движений в суставах редко осуществляются в своей элементарной форме. Большинство движений являются сложными. Даже в таком, казалась бы, простом случае, как движения ногтевых фаланг пальцев, можно заметить, что при сгибании они слегка супинированы, а разгибание сопровождается пронацией фаланг. Сочетание сгибания и разгибания с некоторой степенью вращения характерно и для других блоковидных суставов. Например, в локтевом суставе при полном разгибании происходит пронация локтевой кости, а при сгибании она супинируется. Благодаря комбинации сгибания и разгибания с вращением блоковидный сустав выводится из замкнутого положения и снова приводится в такое положение. Подобного рода замыкающие и размыкающие движения относятся к обычным движениям в суставах.
Распространенным видом сложных движений является последовательное движение. При этом часть тела, например конечность, последовательно переводится из одного положения в другое и в результате серии движений может вернуться в исходное состояние. В данном случае говорят об эргономическом цикле. Подобные циклы характерны для различного рода повторяющихся рабочих движений.
Различают два вида вращательных движений: сочетанные и независимые. Сочетанное вращение имеет место при осуществлении последовательных движений. Чтобы выявить сочетанное вращение, нужно опустить руку с полупронированным предплечьем так, чтобы ладонь была обращена к бедру. Затем рука поднимается вперед до горизонтального уровня и отводится в сторону на 90°, причем сохраняется полупронированное положение предплечья. После этого рука приводится к туловищу, и оказывается, что теперь она повернута к бедру уже не ладонью, а локтевым краем. Это значит, что в ходе последовательных движений произошло вращение наружу в плечевом суставе на 90°. Если из нового положения повторить тот же цикл движений, то снова произойдет поворот руки на 90°, и кисть будет обращена к бедру своей тыльной стороной. Произвести движения в третий раз, очевидно, уже не удастся. Таким образом было получено вращение в результате серии движений, которые сами по себе не являются вращательными. Такое сочетанное вращение возможно в любом суставе, имеющем 2 или 3 степени свободы. Всякое другое вращение называется независимым вращением.
Факторы, определяющие объем движений в суставах
Объем движений в каждом суставе зависит от целого ряда факторов.
Разность площадей сочленяющихся суставных поверхностей — главный фактор. Из всех суставов наибольшая разность площадей суставных поверхностей в плечевом суставе (площадь головки плечевой кости в 6 раз больше площади суставной впадины на лопатке), поэтому в плечевом суставе самый большой объем движений. В крестцово-подвздошном сочленении суставные поверхности по площади равны, поэтому движения в нем практически отсутствуют.
Наличие вспомогательных элементов. Например, мениски и диски, увеличивая конгруэнтность суставных поверхностей, увеличивают объем движений. Суставные губы, увеличивая площадь суставной поверхности, способствуют ограничению движений. Внутрисуставные связки ограничивают движения только в определенном направлении (крестообразные связки коленного сустава не препятствуют сгибанию, но противодействуют чрезмерному разгибанию).
Комбинация суставов. У комбинированных суставов движения определяются по суставу, имеющему меньшее число осей вращения. Хотя многие суставы, исходя из формы суставных поверхностей, способны выполнять больший объем движений, но он у них ограничен из-за комбинации. Например, по форме суставных поверхностей латеральные атлантоосевые суставы — плоские, но в результате комбинации со срединным атлантоосевым суставом они работают как вращательные. Это же относится и к суставам ребер, суставу кисти, суставу стопы и др.
Состояние капсулы сустава. При тонкой, эластичной капсуле движения совершаются в большем объеме. Даже неравномерная толщина капсулы в одном и том же суставе сказывается на его работе. Например, в височно-нижнечелюстном суставе капсула тоньше спереди, чем сзади и сбоку, поэтому наибольшая подвижность в нем именно кпереди.
Укрепление капсулы сустава связками. Связки оказывают тормозящее и направляющее действие, так как коллагеновые волокна обладают не только большой прочностью, но и малой растяжимостью. В тазобедренном суставе подвздошно-бедренная связка препятствует разгибанию и повороту конечности кнутри, лобково-бедренная связка — отведению и вращению наружу. Самые мощные связки находятся в крестцово-подвздошном суставе, поэтому движений в нем практически нет.
Мышцы, окружающие сустав. Обладая постоянным тонусом, они скрепляют, сближают и фиксируют сочленяющиеся кости. Сила мышечной тяги составляет до 10 кг на 1 см поперечника мышцы. Если удалить мышцы, оставить связки и капсулу, то объем движений резко возрастает. Кроме непосредственного тормозящего действия на движения в суставах, мышцы оказывают и косвенное — через связки, от которых они начинаются. Мышцы при своем сокращении делают связки неподатливыми, упругими.
Синовиальная жидкость. Она оказывает сцепляющее воздействие и смазывает суставные поверхности. При артрозо-артритах, когда нарушается выделение синовиальной жидкости, в суставах появляются боль, хруст, объем движений уменьшается.
Винтовое отклонение. Имеется только в плечелоктевом суставе и оказывает тормозящее воздействие при движениях.

Состояние кожи и подкожной жировой клетчатки. У тучных людей объем движений всегда меньше из-за обильной подкожной жировой клетчатки. У стройных, подтянутых людей, у спортсменов движения совершаются в большем объеме. При заболеваниях кожи, когда теряется эластичность, движения резко уменьшаются, а нередко после тяжелых ожогов, ранений образуются контрактуры, значительно препятствующие движениям.
Число степеней свободы движений соответствует количеству возможных независимых линейных и угловых перемещений тела.
Тело, ничем не ограниченное в движениях (может двигаться в любом направлении), называется свободным. Движение свободного тела возможно в трех основных направлениях — вдоль осей координат, а также вокруг этих трех осей; оно имеет 6 степеней свободы движения (рис. 5, а).
Наложение связей уменьшает количество степеней свободы (табл. 1). Если закрепить одну точку тела, то сразу снимается 3 степени свободы: тело не сможет двигаться вдоль трех осей координат; у него останутся только возможности вращения вокруг этих осей, т. е. только три степени свободы (см. рис. 5, б). Так соединены кости трехосных (шаровидных) с у с т а в о в.

При закреплении двух точек в теле возможно вращение лишь вокруг линии (оси), проходящей через обе точки (см. рис. 5, в). Так соединены кости одноосных суставов, обеспечивающих одну степень свободы. Если же закреплены три точки (не лежащие на одной линии), то движения тела совсем невозможны (см. рис. 5, г). Та кое соединение неподвижно и, следовательно, не является суставом.
Как известно, двуосные суставы (эллипсовидный — лучезапястный, седловидный — первый запястно-пястный) обеспечивают вторую степень свободы благодаря неполному взаимному соответствию своих суставных поверхностей (неконгруэнтность). По этой же причине, если рука в локтевом суставе согнута, возможны приведение и отведение локтевой кости в плечелоктевом сочленении (например, при поворотах отвертки, штопора, ключа вокруг оси, проходящей вдоль второй пястной кости. в преобладающей части суставов тела человека 2 или 3 степени свободы. При нескольких степенях свободы движений (двух и более) возможно бесчисленное множество траекторий. Значит, в движениях в неодноосных суставах отсутствует определенность, задаваемая способом соединения. Тем более это характерно для цепей с несколькими неодноосными суставами.
Множество возможностей движений в суставах кинематической пары более чем с одной степенью свободы в отличие от технической пары требует для выполнения каждого определенного движения: а) выбор необходимой траектории, б) управления движением по траектории (направлением и величиной скорости) и в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории (см. гл. IV).
2.4. Геометрия движений
Число основных осей сустава соответствует количеству степеней свободы движений одного звена относительно другого. Плоскость движения перпендикулярна оси вращения и характеризует направление перемещения звена. Размах движений — это угловое перемещение звена из одного крайнего положения в другое.
В суставном движении различают ось, плоскость и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей (не считая незначительного скольжения). Однако не существует суставов совершенно правильной геометрической формы. А если бы даже такие и были, то при сдавливании гиалиновых суставных хрящей форма суставных поверхностей нарушалась бы. Следовательно, геометрические оси вращения не постоянны и правильнее говорить о мгновенных осях вращения. В связи с этим количество осей в суставе означает в биомеханическом смысле только количество степеней свободы движения, а не постоянных геометрических осей вращения.
Продольные оси звеньев чаще всего не строго перпендикулярны геометрическим осям вращения. Поэтому различные точки звеньев движутся в плоскостях, параллельных друг другу, а сама продольная ось звена описывает поверхности, близкие к коническим. Таким образом, плоскость движения в суставе характеризует, в какой плоскости движутся точки звена. Она перпендикулярна геометрической оси вращения и не обязательно совпадает с плоскостью движения продольной оси самого звена.
Размахом движений измеряется подвижность в каждом отдельном суставе1. Наибольший размах бывает в пассивных движениях; с увеличением внешней нагрузки (вес отягощения, силы инерции) растягиваются мягкие ткани-ограничители. Размах же в активном движении меньше, чем в пассивном, так как там мышцы имеют предел силы, в то время как величина внешних сил не ограничена. К тому же сила собственных мышц пары звеньев приложена невыгодно при крайних положениях звеньев в суставе.
Подвижностью соседних звеньев в соединениях каждой пары обусловлена гибкость всей кинематической цепи в целом. Гибкость цепи (например, позвоночника) измеряется общим размахом движения концевого звена относительно другого конца цепи.
Общий размах движения в целом бывает меньше суммы размахов изолированных движений в суставах, так как вследствие пассивной недостаточности многосуставных мышц возникают дополнительные связи.
В процессе эволюции первые признаки конечностей, в том числе и нижних, появились у кистепёрых рыб. При изучении строения плавников этих существ обнаружили характерное строение конечностей: две кости (как голень), несколько мелких (аналог предплюсны) и трубчатые, напоминающие плюсну и фаланги пальцев.
С течением времени и совершенствованием живых организмов, произошли значительные структурные перестройки скелета, адаптирующие к наземному образу жизни.
В процессе эволюции с приобретением прямохождения верхние конечности утратили опорные функции, а конечности нижние полностью взяли на себя и эту задачу, и локомоцию (совокупность согласованных движений, посредством которых живое существо передвигается в пространстве).
Читайте также:
